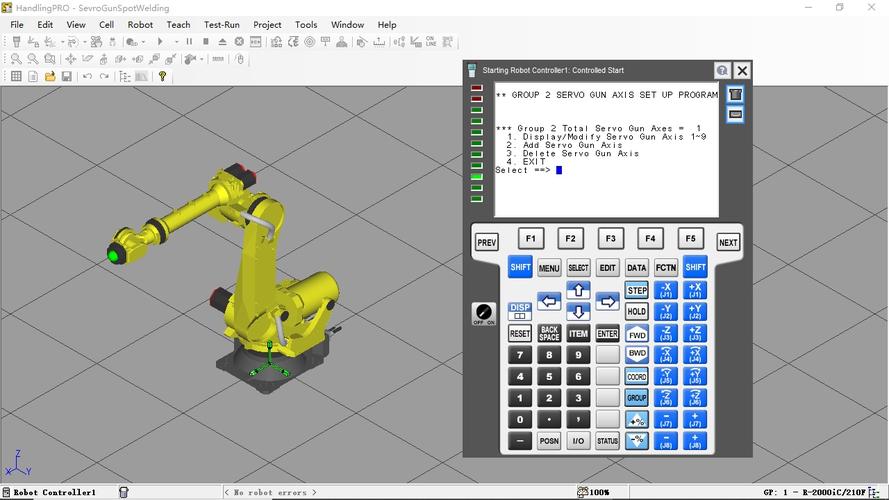
创建完成并添加一个焊枪,如下图所示:
1、依次按键【MENU】-【利用工具】-【焊枪设置】路径,打开焊枪设置界面,如下图所示:

2、在打开的设定界面下可以看到,如下图所示的设定内容和提示语:
3、设置焊枪运动方向:按回车键进入设定界面,如下图所示:
按提示的步鄹,焊枪有一个动电极头和一个静电极头,我们要移动动电极头,SHIFT+(X方向)看动电极头的移动方向,以是要先切换至动作组2(焊枪),切换方法(左图)及查看办法(右图)如下图所示:
4、切换至焊枪运动组后,按SHIFT和+X方向键,可看到焊枪向闭合的方向移动,故设定为关,如下图所示:
5、移动方向确定后,按键F3完成,退出运动方向设定界面,完成后如下图所示;
设置焊枪的规格,零点标定等:此处需按实际利用的焊枪规格填写,此处仿照,我们随意设天命值,演示用。
6、按确认ENTER键,弹出是否知道焊枪电极头的移动方向,在上面一步已设定,选【是】,如下图所示:
7、再次弹出是否知道焊枪行程,我们安装的焊枪参数已知【是】进入下一步,如下图所示:
8、如下图所示,设定焊枪开合的极限数据,依照实际焊枪参数写,如下图所示:
完成设定后,如下图所示:
9、自动调度:按回车键后,提示按组合键,如下图所示;
10、按shift键+实行,弹出确认信息,如下图所示:
11、此时会看到焊枪电极开始自动调度,示教器界面也会有提示调度过程,等待自动调度完毕即可,如下所示:
调度完成后,如下图所示:
12、厚度检讨标定:设定过程与上述步鄹一样,按shift键+实行键自动标定,标定完成后如下图所示:
13、验证焊枪设置:退出设定界面,切换焊枪运动组,移动电极头至完备打开位置,极限报警提示,可以看到数据,如下图所示,与前面设定的数据同等,代表焊枪设定无误,关闭同样办法验证。
完成以上焊枪参数设定后,就可以利用SPOT点焊指令编写大略的演示程序。
以上关于伺服焊枪焊枪的设定,设定完成后方可进行点焊程序的编写。
FANUC机器人点焊之(三)焊枪设置
http://bbs.plcjs.com/forum.php?mod=viewthread&tid=501074&fromuid=17
(出处: PLC论坛-全力打造可编程掌握器专业技能论坛)
#非标自动化#