大华股份AI荣获双目立体匹配算法评测环球排名第一
近日,大华股份基于深度学习的双目立体匹配算法,刷新了KITTI Vision Benchmark中双目立体匹配竞赛的最好成绩,超越了其它一流AI公司和顶尖的学术研究机构,以及ICCV、ECCV、CVPR干系论文中的双目立体匹配研究成果,这标志着大华股份在双目立体匹配算法领域处于领先水平。

大华股份在AI技能领域持续耕耘与创新,不断提升算法、算力的核心竞争力。2018年,大华股份取得道路分割、车辆跟随、多目标跟踪、3D目标检测、人体检测、车辆检测、场景流、光流、行人检索等12项环球AI排行榜第一;2019年,大华股份取得行人重识别、目标实例分割、图像语义分割、步态识别、遥感图像剖析等十项环球AI排行榜第一。2020年初,大华股份在 MIT Scene Parsing Benchmark场景解析任务中取得了第一。本次在双目立体匹配算法领域再次取得新打破。大华股份积极加速AI技能成果向现实生产力转化,赋能行业智能化升级。
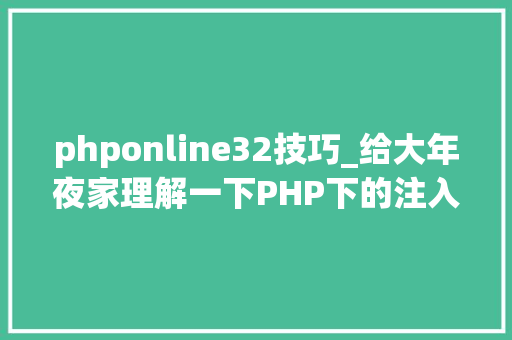
大华股份AI最新双目立体匹配算法评测环球排名第一(提交韶光:2020.04.07)
(截图来源:www.cvlibs.net/datasets/kitti/eval_scene_flow.php?benchmark=stereo)
关于KITTI:
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技能研究院联合创办,是目前国际上最大的打算机视觉算法评测数据集之一。数据集用于评测立体匹配(stereo)、光流(flow)、场景流(sceneflow)、视觉里程计(visual odometry)、物体检测(object detection)和跟踪(tracking)、道路分割(road)、语义分割(semantics)等打算机视觉技能在车载环境下的性能。KITTI包含市区、村落庄和高速公路等场景采集的真实图像数据,每张图像中最多包含15辆车和30个行人,且存在不同程度的遮挡与截断。
双目立体匹配:
双目立体匹配是场景三维感知的主要手段,在3D重修,智能机器人、自动驾驶、AR等领域中有着广泛的运用。双目立体匹配算法通过对旁边目相机拍摄的图像进行相似性匹配,并得到视差图,随后根据立体几何事理推测场景深度。
在本次国际测评中,大华基于自主研发的深度学习平台,开拓了一种基于深度神经网络的立体匹配算法。该算法采取了ASPP的构造对输入图像进行多尺度特色提取,并将传统的SGM算法融入到神经网络中。此外,在演习过程中加入了额外的自监督学习策略,有效地提高了算法的精度。
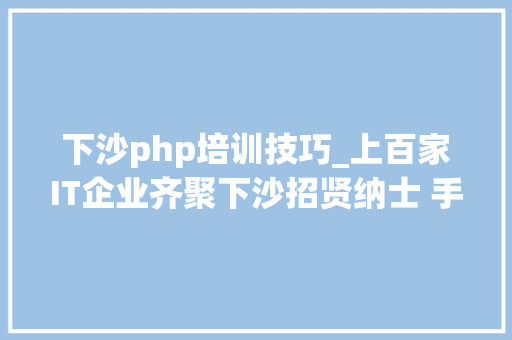
输入图像(一)
可视化视差图(一)
偏差图(一)
输入图像(二)
可视化视差图(二)
偏差图(二)
△以上图片为该国际威信评测数据集的立体匹配算法效果图
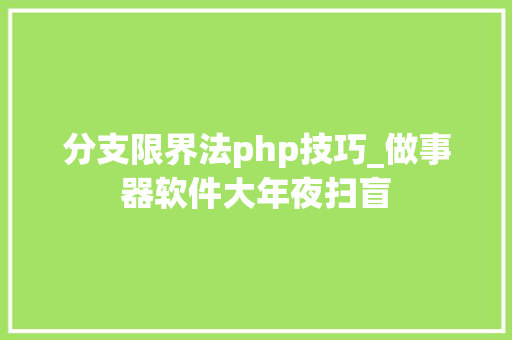
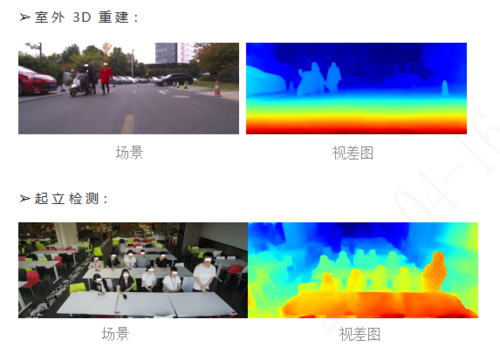
大华实际产品和未来产品中的运用
➢室外3D重修:
场景 视差图
➢起立检测:
场景 视差图
本次评测中利用的技能已在大华双目摄像机等产品中得到运用,提升了双目摄像机的捕获目标深度数据、目标分离等性能,赋能场景化运用代价。