滑轨最紧张便是X轴(水平移动)和Z轴(旋转),如下图:
1.1 X轴水平滑动第一须要滑动的组件、第二须要一个驱动的力,滑动的组件首先想到雕刻机所利用的的滑块,平稳、受力均匀,驱动刚开始是想用皮带传动,后面仔细考量还是决定用丝杆,实在两者各有好处:丝杆输着力矩大,精度高,但长度1米多的丝杆总会那么点不直(重力导致),因此在丝杆中部迁徙改变时会涌现轻微高下起伏;而皮带则是速率快,精度低些,输出的力不能太大,长度长的会有点弹性,这也是不愿见到的。综合考虑还是以为用丝杆。

滑动部分则是用12mm直径3k碳纤维杆(1mm厚)+12mm直线轴承座,但悲剧的事宜涌现了,在收到滑块和碳纤维杆时创造碳纤维杆虽说是12mm外径,但有的地方直径却到了12.4mm,滑块穿进去后卡在那,毕竟不是用于精密工业的,只好用砂纸一点点打磨(打磨不能多也不要少);此外碳纤维杆还有另一个问题,由于它直径仅有12mm,因此在滑块运动中到了中部涌现轻微抖动(中间弹性大),早知道就买20mm直径2mm厚的碳纤维了,现在也没法改了,由于要改的话滑块、支撑座等全部都得换,因此得在程序里想办法了。

1.2 Z轴则大略多了,42mm长轴步进电机(信浓的)+皮带传动,后来还是碰着了另一个棘手问题,那步进电机在断电时用手轻轻一转就能迁徙改变,因此无法保持Z所在角度,后来只好用减速步进电机代替它,价格更便宜且稳定性也好。
之后将其固定在6mm亚克力板上,但开始设计时看错了滑块的长度(短了2mm),后来为此将9块板子上所有滑块的孔扩了2mm,用了3个多小时,先用电动工具打磨,再用锉刀手动加工。
红框处均要将孔位偏移2mm,下面的8块是补偿丝杆平面与滑块间的高度差。
装电路板的盒子,空间有限于是将它固定在X轴电机下方。
2.驱动部分办理了,现在便是电路部分,电路首先耗电要低,且面积不能大,不然得外置了,于是有了下面的构造:0.96的OLED显示屏+5V超小降压模块+A4988模块+ULN2003芯片+ATmega328P芯片,本来预留了串口可以扩展增加蓝牙或wifi模块,但由于程序空间不敷以是也没加了。
3.1 X位置0点旗子暗记用微动开关检测,Z轴用霍尔传感器(后来创造Z的0点没必要其检测)。
3.2 电池需采取8V以上的电压,后来直接采取4节18650电池,降落了电流,担保了续航及A4988输出的力矩。
4.1 那么统统设计均准备好后就开始安装及制作了。先把碳纤维杆组好X轴,确定好杆子平行且露出长度同等,说实话有点难把握,由于那个轴承支撑座有几个不是同一的体型,固定孔位有点偏了,买的数量刚得当没有多的,但也
4.2 Z平台安装的确有点麻烦,预先设计的孔位不能用(由于后来临时换为减速步进电机),首先重新打安装孔,调节松紧度,由于减速电机的轴里面是塑料的,后来又在其上方加了个亚克力板支撑顶端。
旋转部分装好,接着就把滑块和T8螺母装上:
完成紧张机器部分,接下来便是制作电路和安装电路了。
拍照滑轨DIY 2
5.先根据接插口和固定孔位等绘制PCB的边界,再根据事理图画好PCB板。
由于用雕刻机打消部分区域,以是韶光用了2个小时,焊好元件后再用测试程序测试各个部分是否正常,幸运的是全部都无问题,雕刻机刻出的线很随意马虎涌现短路,不过刻得深就没事(但线间距就得很大)。接着将其涂上一层绿油,可恨的是用那365nmUV紫外线紫光led照了半天一点反应都没,后来直接用蓝紫激光逐片照,不过效果还不错。
个中mega328因此前留下的最小系统板(事理图有其输出IO解释),通过插针焊接到主板上,节省了部分主板面积。其下部由唯一的一个指示灯,以前打算用来指示运行状态,由于有OLED屏,以是现在此灯用于指示快门按下。
6. 下面便是程序部分了,调试程序时我是用它来代替相机的:
这个分量该当够了。先是测试Z旋转,减速步进电机是64:1的,加上皮带4:1减速,所以是4096步为90度,电机是1/2细分,以是8步一个周期。X轴是2mm导程丝杆,A4988为1/8细分,因此800steps/mm,X有效运动长度1024mm,由于负载的关系,若速率快则必会失落步,因此末了调节为:Z迁徙改变时5ms一步,X轴300us一步。
其次全体程序是利用定时器来定时,到韶光则驱动按一定量输出,设置时需设置一下基本信息:每步步长(每次转多少角度或长度)、运动多少次、每次运动间隔,此外还有运动总时长限定、运动范围限定、循环次数、运动方向,部分参数可不输入,只要有足够参数能确定每步所走的长度或角度、运动间隔即可,别的会自动算出(若信息不敷会自动取消实行本次运动)。其余主要的一点便是按下快门完毕后才开始运动(即等待N ms->按下快门->运动),不仅留有足够韶光平稳且不会影响延时拍照过程。这些都是基本算法,只是要韶光调试而已,其次便是操作界面,在那OLED屏上做良好的interface估计有点难,但做到大略实用倒是可以的,因此设置了三级菜单:
统共三个按键,左键/中键/右键,中键由两个功能:一个是进入菜单,或者说是确认,用于进入菜单及设置时切换选项;另一个便是退出(长按约1s),此外在一级菜单下,长按会直接进入当前选项的运动模式。旁边两个键则是高下选择菜单或增减数值。
7.1 实在紧张的程序还是目标追踪及其设定,这不得不先理解大略的三角函数等:
上面演示了相机中央线与目标成α°时的各种情形。假设相机中央点正对目标,以第一种为例:
在此先大略说下目标如何校准设定,只需四步即可,第一是将相机固定放好,并将目标放到终极取景的状态;第二步调节Z角度使相机取景中央对着目标物体,这时就能知道上图的α角度;第三步将相机调节到中央线与AB垂直,即相机平面与AB同平面,这时就能得到CA与AB成的角度,即角A;第四步,Z平台会运动至X末端(B点),此时再调度相机角度使个中心线对着目标,这时就能得到角B的值。
得到基本参数后就能利用公式算出CH、AH的值,tan∠B=CH/BH,tan∠A=CH/AH,而BH-AH=AB=1024mm,因此CH/ tan∠B- CH/ tan∠A=1024mm,角A、B已知,以是CH就算出来了,同时也可求得AH的值。
在α=0时,为担保相机始终正对着物体,相机在X各点位置可通过CH、AH和相机在Z轴的角度(中央线与AB的夹角a’)算出:x=CH/tan∠a’-AH。当然也可以从X的位置反推出Z需转的角度。
7.2 但若相机不是正中央对准目标呢(α≠0)?为了追踪目标中央线与目标的夹角α在各处有何种情形?
首先在A点时相机中央线与物体夹角为α,然后相机沿X运动。假设相机是沿着以目标为圆心的圆形轨迹,则相机就能把目标的360度全部拍摄出,且目标始终处在取景器里某一特定位置(即夹角保持不变)。
下面用图来大略剖析(下图相机中央线BO与BC夹角为α度):
先以C做一个圆,半径为CA的间隔,在CB上交点为B’,OE垂直OB,OE为实际成像照片右半部分(O为中点),作B’D平行BE,作B’O’平行BO,那么在B’那拍照(视角角度不变,角O’B’C和角OBC均为α°)所成的照片右半边就为O’D。因此只要证明C点在O’D所在位置的比例与C在OE所在位置的比例一样,就能解释无论在B点拍摄还是在B’位置拍,目标C在照片的相对位置是不变的,仅仅大小会有点变革。
证明也很大略,B’D平行BE,B’O’平行BO,则三角形OBE与三角形O’B’D相似,以是O’C/OC=CB’/CB=CD/CE,即O’C/CD =OC/CE。
因此只要先将相机中央线运动对准目标,然后再转α角度就能在任何位置保持目标在照片中位置与在A点时的同等。
上面便是目标追踪模式的大略事理,不过也有的是用机器事理实现的,但没拆过不太理解详细事理。
8.1 其次是掌握相机,最开始设计时是考虑再单独利用快门线来实现延时拍照(相机掌握旗子暗记有快门线定时发送),只要滑轨定时周期与快门线的同等,则它就能同步进行拍照,但这个同步太难把握了,于是就不得不进行电路改进,这也导致Z轴的原点校准功能去掉了(实际没什么用),但主控部分到Z平台仅有一根数据线,且航空插头只有8芯,步进电机就用了5芯了,剩下3芯不但要掌握快门、对焦,还得采集快门何时关闭,地线必须占一根,剩下2根线如何实现那三个功能?
先来大略先容下快门线事情事理,实在它紧张便是起到一个短接浸染,如下图Canon快门2.5mm插头:
短接就能操作相机,快门那是按下一瞬间相机就打开快门,若不是B门(B门是断开快门短接才关闭快门)则关闭韶光由相机决定。那么再看看如何检测快门是否关闭了,实在相机热靴上是有输出的,最中间那个圆点和地间在快门开启时处于短接状态,快门关闭后则断开。
8.2 虽然知道了事理,但是问题是可用的旗子暗记线不足,那么如何能切换端口输出和输入呢?刚开始是打算利用一个8脚单片机,通过发送指令去掌握,但是又以为有点摧残浪费蹂躏,以是末了还是以为用三极管等单路去实现它。
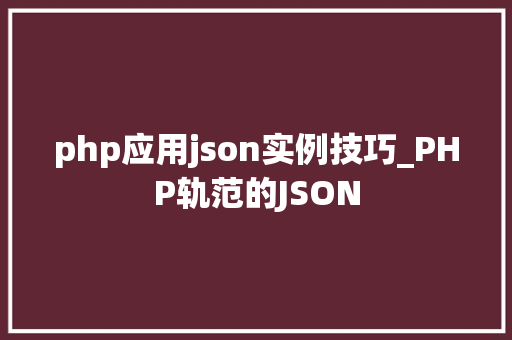
当然最开始肯定是用NI Multisim仿真事理,末了得到如下电路:
S1仿照快门旗子暗记输入,Q1的集电极接掌握输出,Q2集电极那端接单片机IO,S2、S3仿照单片机输出高低电平。作为输出模式时,S1断开,则Q1导通(R8上拉),在单片机输出高时,Q3也导通,终极将被控端拉低;输入模式时单片机IO为弱下拉模式,在S1短接时Q1处于非导通状态,Q2基极为低电平,Q2导通,则单片机IO被拉至高电平,同时被控端因Q1关闭也不会输出。这样就实现了单个IO即掌握输出又能实现另一端口输入。
此时还需增加引线到相机,下面是做好的两根线:
2.5mm插头是接相机,3.5mm四节的接到Z平台上的耳机插口上。
不插热靴则不检测快门的关闭(直接用下面那跟2.5mm转3.5mm的线即可),电路板用热熔胶密封以便防水,但是那步进电机却没法防水。
拍照滑轨DIY 3
9. 下面是跟踪目标模式下的照片(不要在意里面的景物):
全部硬件概览:
主控部分及X轴驱动部分,95%螺丝螺母均采取304不锈钢的:
还有四个支撑脚未装,还没找到好的固定办法(虽然买了8mm螺杆,150mm长,但那些都不是重点)。
Z平台:
这便是八百多元的东西(仅是硬件上的本钱),若要挑问题则一定能挑出很多,比如设定追踪目标时若移动到X末端(B点)再调节相机角度,此时估计手就不足长了,由于要在末端查看相机取景处(不过现在很多相机均可用手机wifi连接查看),这也是省去繁杂线的代价,但这完备是自主设计的,算不得精良,不过也算及格了。
看似大略的东西在制作中碰着了n多个困难,唯有靠自己逐个办理,DIY是种精神,更是一种自我折腾。
紧张设计文件及程序需在原帖下载:http://bbs.mydigit.cn/read.php?tid=1986895
感激不雅观看
浏览更多精彩内容请登录数码之家网站
技能互换请联系原作者
作者:ly7317090803
来源:数码之家