量子位 宣布 | 公众年夜众号 QbitAI
在拍照时我们常常会碰着这样的苦恼:由于设置的快门韶光太长,快速运动的物体会在身后产生严重的拖影。

除非是为了分外的艺术效果,一样平常来说这张照片就报废了。

然而来自MIT的研究职员却见告我们,拍糊了的照片不要扔,丢给这个神经网络,还你一份运动视频。拖影里包含的信息实在可以找回丢失的韶光维度。
他们提出的模型可以从运动模糊的图像中重新创建视频。论文第一作者说:“我们能够规复这个细节险些就像魔术一样。”
不仅如此,作者还表示,这种模型不仅可以办理韶光维度上的丢失,还能挽救空间维度上的丢失。未来这种技能乃至可能从2D医学图像中检索3D数据,只用一张X光片得到CT扫描的信息。
目前这篇论文已经被打算机视觉顶会ICCV 2019收录。
规复视频并不随意马虎
照片和视频常日会将时空折叠到更低维度上,我们将之称为“投影”(projection)。
比如拍摄X光片,是把3D图片投影到一张2D底片上,这是空间上的投影。永劫光曝光,让星星在照片上留下常常的轨迹,这是韶光上的投影。
投影过程中会丢失信息,下面的向量投影中,我们就丢失掉了另一个维度的信息,而且完备无法规复。
但是大多数物体的尺寸常日比其在图像中拖影的尺寸小得多,研究职员可以通过投影的旗子暗记天生恢复原貌的概率模型。
之前,也是来自MIT一项研究,用一种“角落摄影机”的算法可以检测到拐角处的人。在这样的场景中,由于边缘遮挡物的存在,场景的反射光会沿空间维度塌陷。
但是这种算法并不完善,目前仅能根据模糊图像规复一些大略的线条。而最新的这项研究则可以较清晰地规复物体的原貌。
从模糊中规复原形
MIT的研究职员网络了一个由35个视频组成的数据集,个中有30个人在指定区域中行走。他们将所有视频折叠成用于演习和测试模型的投影。
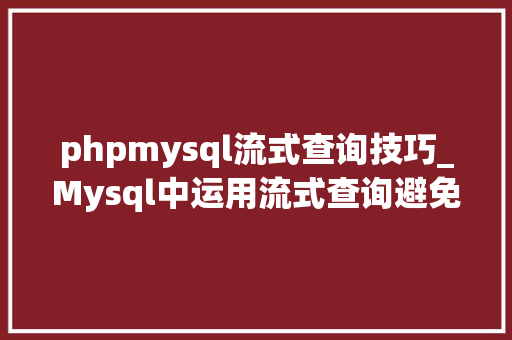
模型从投影中精确地重新规复了人行走过程中的24帧。而且该模型彷佛理解到,随着韶光而变暗和变宽的像素可能对应于一个人在靠近相机。
此外,他们还在人脸数据集FacePlace上进行了测试,从旁边摆动高度模糊的图像中规复出五官样貌。
如果图像中有两个物体在运动,该算法也能处理。
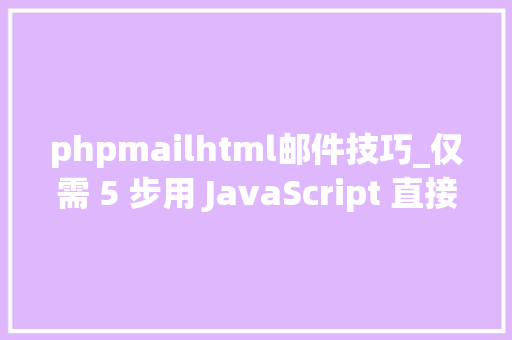
研究职员让两个MNIST手写体数字相互运动,图像乃至模糊到连一样平常人也看不出里面是什么,但AI模型不但推断出了数字的笔画形状,还剖析出了两个数字的运动方向。
事理
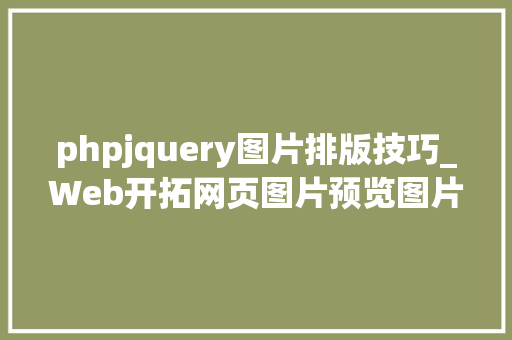
实现从2D投影到规复3D时空的的网络架构如下图所示:
该网络有三个参数化函数:qψ(·|·) 表示变分后验分布,pφ(·|·) 表示先验分布,gθ(·, ·)表示反投影网络。z在演习时从q网络中采样,在测试时从p网络中采样。
对付后验分布的参数编码器q,个中包含一系列3D跨度卷积运算符和Leaky RELU激活函数,以得到μψ和σψ两个分布参数。
条件先验编码器p以类似的办法实现,由于没有韶光维度信息,它只有2D跨度卷积。
对付反投影函数gθ(x, z),它利用UNet型的体系构造打算x的每个像素特色。UNet分为两个阶段:在第一阶段,运用一系列2D跨度卷积算子提取多尺度特色;第二阶段运用一系列2D卷积和上采样操作,合成x和更多数据通道。
传送门
干系宣布:
https://www.eurekalert.org/pub_releases/2019-10/miot-rd101619.php
论文地址:
https://arxiv.org/abs/1909.00475
— 完 —
诚挚招聘
量子位正在招募编辑/,事情地点在北京中关村落。期待有才华、有激情亲切的同学加入我们!
干系细节,请在量子位"大众年夜众号(QbitAI)对话界面,回答“招聘”两个字。
量子位 QbitAI · 头条号签约作者
վ'ᴗ' ի 追踪AI技能和产品新动态